





[REP Index] [REP Source]
| REP: | 119 |
|---|---|
| Title: | Specification for TurtleBot Compatible Platforms |
| Author: | Melonee Wise, Tully Foote |
| Status: | Draft |
| Type: | Standards Track |
| Content-Type: | text/x-rst |
| Created: | 5-Dec-2011 |
| ROS-Version: | Electric |
| Post-History: |
Contents
Abstract
This REP outlines compatibility defintions for TurtleBot compatible platforms. The TurtleBot is a specific product, but it is an Open Hardware Design released under the FreeBSD Documentation License. [8] [9] The purpose of this document is to differentiate the critical design features which are necessary for compatability from the other design features which can be modified without functionally effecting the core design. This document is meant to be a guideline for the development of new cheaper or more functional robots that can still leverage the development efforts of the TurtleBot community.
Motivation
Developers of TurtleBot applications, hardware accessories, models, and libraries need a share convention for compatibility in order to better integrate and re-use software and hardware components. Shared conventions for compatibility provides a specification for developers creating new hardware configurations, and accessories for TurtleBot compatible platforms. Similarly, developers creating libraries and applications can more easily use their software with robots that are compatible with this specification.
It is expected that most tools and applications written for a TurtleBot should run on a Level 1 compatible robot.

A TurtleBot
The TurtleBot is trademarked by Willow Garage. If you would like information on producing TurtleBot branded product please contact Willow Garage at turtlebotinfo@willowgarage.com . This document is designed to allow others to develop robots which can take advantage of the growing community around the TurtleBot design.
There are many tools and applications written for the TurtleBot which can be useful for other similar robots. Level 2 compatible robots are a subset of these robots for which a majority of the applications will work. There are already a number of robots which are TurtleBot compatible such as Mini Max [6] and Pi Robot [7] .
Mini Max the robot.
TurtleBot Core Features
TurtleBot is a low-cost, open-source software and hardware personal robotics kit. The TurtleBot main hardware features include a mobile base, rgbd sensor, on board computation, wireless communication, and expansion space for adding new hardware.
Compatibility Specification
There are two levels of compatability defined in this REP. Level 1 compatable robots are expected to be able to be swapped out without significant code changes. Level 2 compatable robots are expected to be able to share significant software components, but may require non-trivial changes to software between robots.
Below are the specifications for each of the levels of compliance:
Level 1
Robots that are level 1 compatible meet the following requirements as well as all Level 2 requirements.
Hardware Requirements
The following hardware requirements are to ensure that the default TurtleBot software runs without modification on the robot and to ensure accessory compatibility between TurtleBot compatible robots.
- The robot must have a rgbd camera with a base_link to camera_rgb_frame translation of [x:-0.087m, y:-0.0125m, z:0.287m], as specified in the turtlebot.xacro file in the turtlebot_description package.
- The top mounting surface of the robot must provide a hole grid pattern centered around the z-axis of the robot base_link that is identical to the 68-04541_TurtleBot_Plate_2 part found in the TurtleBot hardware documentation and shown in the figure below.
- The top mounting surface of the robot must be 0.2032m (8 inches) from rgbd camera mounting surface.
- The robot fits within a a circle 0.35m in diameter
- The robot must provide at least the following power buses:
- 12V at 1.5A with a male Micro Fit 1x2 connector (Molex 43045-0209)
- 5V at 500mA solderable connection (If connectorized use Micro Fit 2x1 connector (Molex 43650-0218) )
- Accurate Deadreckoning:
- Drive pattern TODO with less than X inches offset and Y radians offset.
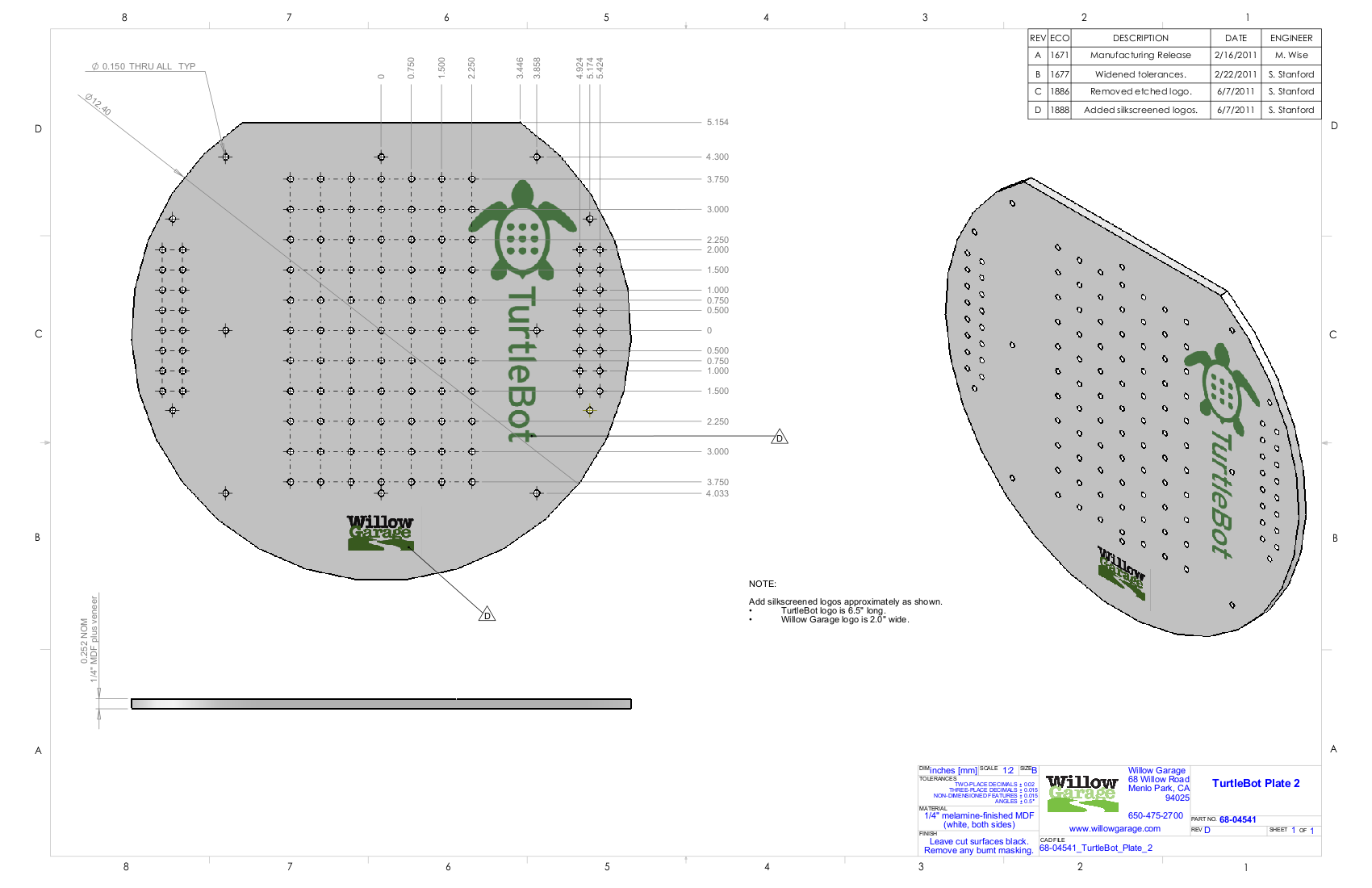
TurtleBot Mounting Surface.
Software Requirements
The TurtleBot stacks (turtlebot, turtlebot_viz, turtlebot_apps, turtlebot_arm) must run on the robot without user modification.
Distributors of TurtleBot Level 1 compatible robots should provide the following software and configuration files if they are different than the TurtleBot:
- A node which implements the TurtleBot Node Core ROS API listed below.
- Provide equivilant diagnostics with turtlebot_node [5]
- Provide turtlebot.launch file to replace turtlebot_bringup/upstart/turtlebot.launch
- If the RGBD sensor requires a breaker to turn on it will use "Breaker 0"
- If an attached arm requires a breaker to turn on it will use "Breaker 1"
TurtleBot Node Core API
Subscribed Topics
- cmd_vel (geometry_msgs/Twist)
- The desired velocity of the robot. The type of this message is determined by the drive_mode parameter. Default is geometry_msgs/Twist.
Published Topics
- odom (nav_msgs/Odometry)
- The odometry of the robot based on the gyro and sensor_state.
- imu/data (sensor_msgs/Imu)
- The angular velocity and integrated position of the gryo.
Expected Parameters
- ~cmd_vel_timeout (double, default: 0.6)
- If a new command isn't received within this many seconds, the base is stopped.
Level 2
Robots that are level 2 compatible meet the following requirements as well as all the hardware extensions and modification requirements.
Hardware Requirements
- An RGBD sensor
- A mobile robot base
- A computer capable of running ROS and processing the RGBD sensor at full frame rate.
- Note: most RGBD sensors require a full USB 2.0 bus to operate correctly, thus most computers will require 2 USB busses if USB periferals are expected to be used.
- Odometry is expected to be accurate within 1% after calibration in both linear and angular movement.
Software Requirements
- URDF description of the robot
- The origin of the base_link is at the rotation point of an in-place turn.
- The depth sensor should publish in the "camera" namespace
- The base moves based on geometry_msgs/Twist [10] on the "cmd_vel"
topic
- If the base is not holonomic, only the components of the command which are achievable should be executed.
- The base publishes nav_msgs/Odometry [11] on the "odom" topic
- REP 105 [2] compliant
Hardware Extensions and Modifications
When adding or creating new hardware for TurtleBot compliant robots distributors should use the following guidelines and conventions:
Location Naming Conventions
Location names should be generic and have semantic meaning with respect to the robot hardware, below are examples of common location names:
- base
- torso
- head
- arm
- shoulder
- upper_arm
- elbow
- forearm
- wrist
- gripper
Sensor Naming Convetions
Whenever possible it is prefered to use the following convention naming for sensor topics/namespaces LOCATION_TYPE. For example:
- base_scan
- head_camera
- forearm_camera
Link, Joint, and Frame Naming Conventions
Whenever possible it is prefered to use the following convention naming for links and connecting joints LOCATION_DESCRIPTOR_TYPE. For example:
Common Joint Descriptors are:
- flex
- lift
- pan
- roll
- tilt
Examples are:
- arm_shoulder_pan_link, arm_shoulder_pan_joint
- head_tilt_link, head_tilt_joint
- forearm_link, elbow_flex_joint
Whenever possible it is prefered to use the following convention naming for links and sensors LOCATION_SENSOR_TYPE. For example:
- head_camera_rgb_link, head_camera_rgb_optical_frame
URDF
When providing an accessory or extension for a Level 1 or 2 TurtleBot compatable robot a URDF description of the extension should be provided which provides at least collision geometries and visualization meshes.
Simulation
There is a package which provides the necessary Gazebo model for Level 1 compliant robots. See the turtlebot_simulator stack [4] for more information.
It is recommended for Level 2 compliant robots to release a stack with the gazebo model(s) which allows them to be simulated as well, to ease development for developers who do not always have access to hardware.

The TurtleBot simulated in Gazebo
Exceptions
The scope of potential robotics software is too broad to require all ROS software to follow the guidelines of this REP. However, choosing different conventions should be well justified and well documented.
Existing REP Compliance
This REP is built upon previous REPs and ROS best practices. All implementations should do the same. Specifically relevant ones are listed below.
- REP 103 [1] Standard Units of Measure and Coordinate Conventions
- All units will follow REP 103 and all cooridnate frames will follow the conventions in REP 103.
- REP 105 [2] Coordinate Frames for Mobile Platforms
- The coordinate frames for the mobile base will follow REP 105.
- REP 107 [3] Diagnostic System for Robots Running ROS
- All hardware drivers should provide diagnostic information via the diagnostic_msgs interface of REP 107.
References
| [1] | REP 103, Standard Units of Measure and Coordinate Conventions (http://www.ros.org/reps/rep-0103.html) |
| [2] | (1, 2) REP 105, Coordinate Frames for Mobile Platforms (http://www.ros.org/reps/rep-0105.html) |
| [3] | REP 107, Diagnostic System for Robots Running ROS (http://www.ros.org/reps/rep-0107.html) |
| [4] | The turtlebot_simulator stack (http://www.ros.org/wiki/turtlebot_simulator) |
| [5] | The turtlebot_node package (http://www.ros.org/wiki/turtlebot_node) |
| [6] | The Mini Max Robot (http://www.showusyoursensors.com/2011/06/introducing-mini-maxwell.html) |
| [7] | The Pi Robot (http://www.pirobot.org/) |
| [8] | The Open Source Hardware Statement and Definition (http://freedomdefined.org/OSHW) |
| [9] | The FreeBSD Documentation License (http://www.freebsd.org/copyright/freebsd-doc-license.html) |
| [10] | http://www.ros.org/doc/api/geometry_msgs/html/msg/Twist.html |
| [11] | http://www.ros.org/doc/api/nav_msgs/html/msg/Odometry.html |
Trademarks
TurtleBot is a trademark of Willow Garage.
Copyright
This document has been placed in the public domain.